Performance
Le temps de cycle qui peut être atteint avec un maître EtherCAT dépend d'un certain nombre de conditions environnementales essentielles, dont certaines sont très différentes selon le projet. Vous trouverez ci-après des informations sur la configuration et des conseils pour savoir si la fonctionnalité requise peut être fournie par l'appareil.
Les facteurs suivants sont déterminants pour cela :
- Sur quel matériel de l'appareil le logiciel est-il utilisé ?
- Quelle est la taille de l'image globale des données de processus du bus ?
• En fonction des participants et, le cas échéant, de leur structure modulaire - Quel est le temps de cycle maximum qui peut être utilisé pour pouvoir effectuer le processus de contrôle nécessaire ?
- Quelle priorité de tâche peut-on donner à la tâche EtherCAT ?
- Dans quelle mesure l'appareil est-il occupé par d'autres tâches ?
Selon la façon dont les réponses aux les questions ci-dessus sont données, il existe d'autres limites de performances pour cette fonction. La procédure suivante est recommandée pour la mise en service :
Réception :
- Un PFC200 (2ème génération) est utilisé comme contrôleur.
- L'image de processus ne dépasse pas 200 octets (par ex. un nombre quelconque de coupleurs de bus de terrain 750-354 avec un total de 25 modules numériques à 8 canaux).
- Le processus permet de régler le temps de cycle à un maximum de 5 ms.
Procédure :
- Configuration de la structure modulaire des nœuds d'E/S et du bus conformément au manuel e!COCKPIT.
- Écriture du programme automate, de l'application Visu, etc.
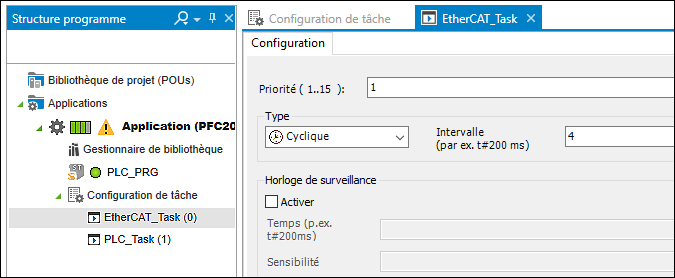
- Réglage du temps de cycle de la tâche EtherCAT à 5 ms.
- Définir la priorité de la tâche EtherCAT sur 6.
- Téléchargez l'application et démarrez le système.
Le système va maintenant essayer d'effectuer les tâches requises. A l'aide des fonctions en ligne d'e!COCKPIT, il est possible de déterminer si cela a réussi :
- Se mettre « en ligne » avec e!COCKPIT
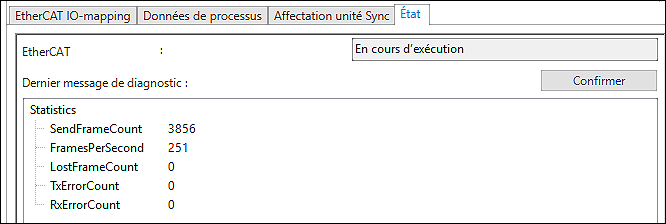
- Ouvrez l'onglet « Status » dans le configurateur de bus de terrain EtherCAT
- Vérifiez dans cette boîte de dialogue
• si le temps de cycle requis est atteint (temps de cycle = 1 / FramesPerSecond [s], dans l'exemple 1/201 s = 47,6 ms),
• si les statistiques indiquent des pertes de télégrammes ou des erreurs.
- Vérifiez si le temps de cycle moyen est respecté ou si les informations sur la gigue changent fréquemment.
• Gigue (µs) : dernière gigue mesurée - la gigue est la différence entre le moment où la tâche devrait commencer et le moment où la tâche commence effectivement. Exemple : Si une tâche doit démarrer toutes les 1000 µs et qu'elle ne redémarre qu'après 1100 µs, alors la gigue est de 100 µs.
• Gigue Min (µs) : gigue mesurée minimale
• Gigue Max (µs) : maximale mesurée gigue

Si aucune perte de télégramme, erreur ou gigue importante ne se produit, la charge CPU se situe dans la plage requise. Le système peut être utilisé avec ces paramètres. Si nécessaire, vous pouvez essayer de réduire le temps de cycle et recommencer le test. Cependant, si le contrôle révèle des erreurs, il faut tenter d'améliorer cet état en modifiant les paramètres mentionnés ci-dessus.
Si des pertes de télégrammes, des erreurs ou une gigue importante se produisent, bien que la charge CPU se situe dans la plage recommandée (~ 80%), cela peut être influencé positivement par une priorité de tâche plus élevée (= nombre inférieur). En cas d'échec, la seule option est de réduire le temps de cycle. Alternativement, il faut évaluer si des pertes de télégrammes sporadiques peuvent être acceptées par l'application.
Le temps de cycle d'un PFC200 (2 ème génération) ne doit pas être inférieur à 2 ms.